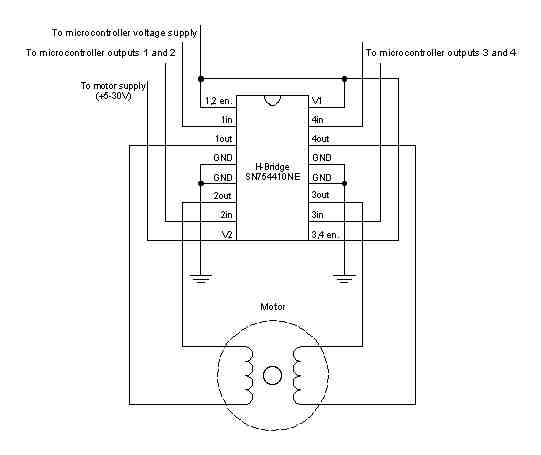
Ongelma on se, että en ymmärrä SN754410ne:n 1out 2out 3out 4out-pinneihin moottorin A B C D-johdot tulevat. Olen yrittänyt tätä pähkäillä ja veikkaisin, että: 1out=A(red), 2out=C(grn), 3out=B(yul) ja 4out=D(blu), olenko ihan hakoteillä ja mitä tapahtuu jos nuo ovat ristissä?
Ensimmäisenä yksinkertaisena harjoituksena toin ohjelman jolla voi ohjata potikalla moottorin nopeutta ja suuntaa. Eli potikassa on pieni nolla-alue keskellä ja mitä kauempana siitä ollaan sitä kovempaa askelletaan käännettyyn suuntaan.
{kind=link}