Ajattelin aikani kuluksi kirjoitella pienen oppaan siitä, miten servosta saa tehtyä vapaasti pyörivän moottorin. Servojahan ohjataan pulssinleveysmodulaatiolla (PWM), yleensä 1,5 ms pulssi siirtää servon keskelle ja esimerkiksi 1ms pulssi tarkoittaa toista ja 2ms toista ääriasentoa. Kyseiset arvot voivat vaihdella eri servovalmistajien kohdalla, joten kokeilemalla löytää oikeat. Alla olevien ohjeiden avulla servosta saa tehtyä ympäripyörivän moottorin, jonka nopeutta ja suuntaa voi muuttaa yksinkertaisesti pulssinleveyttä muuttamalla.
1. Edullinen Supertec S03 -servo
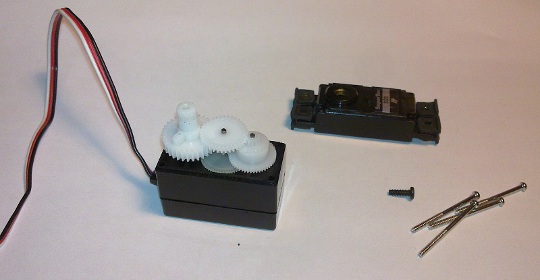
2. Avaa servon kotelo irroittamalla 4 ruuvia.
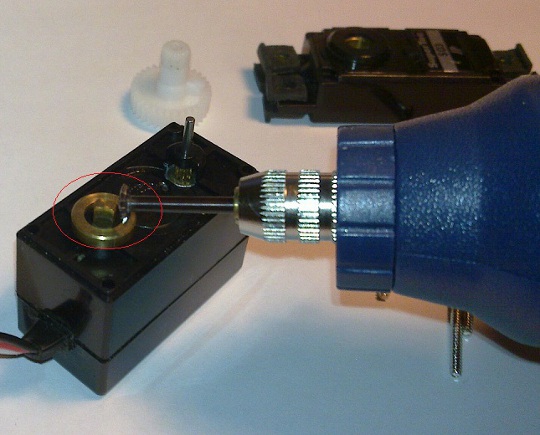
3. Irroita servon sisällä olevat rattaat ja väännä ruuvimeisselillä kuvan nuolen osoittama muovikappale irti.

4. Leikkaa muovikappaleen alla olevaan metallitappiin kolo, johon mahtuu ruuvimeisselin kärki. Itse käytin leikkaamiseen pienoisporakoneen “sahaterää”.

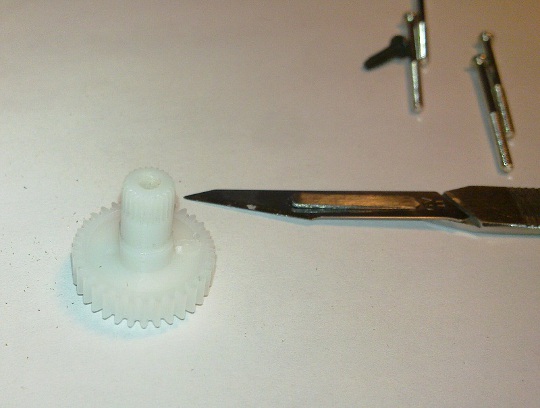
5. Seuraavaksi ota esiin suuri, äskeisen metallitapin päällä ollut ratas ja huomaat siinä kuvan osoittaman korokkeen. Kyseinen koroke estää servoa kääntymästä enempää kuin sen alunperin olisi tarkoitus.
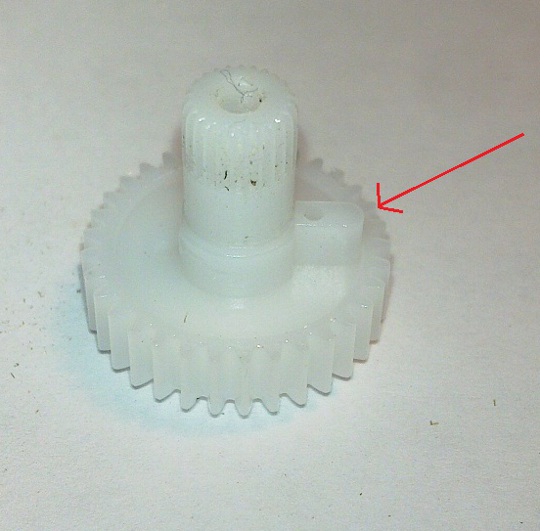
6. Leikkaa terävällä veitsellä kyseinen muovinpalanen pois. Rattaat on tehty melko kovasta muovista, joten esimerkiksi sivuleikkureita voi myös kokeilla.
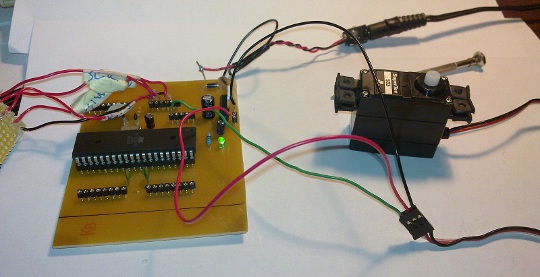
7. Syötä servolle pulssia jonka pitäisi asettaa servo keskiasentoon. Kyseisessä Supertec:n valmistamassa servossa se on 2000us pulssi 20ms (50Hz) välein. Kuvassa servo kytketty AVR Atmega32 -pohjaiseen itsetehtyyn alustaan.
8. Työnnä pieni ruuvimeisseli servon rattaasta sisään koloon, joka rattaan alla olevaan metallitappiin ylempänä tehtiin. Tämä kääntää servossa olevaa potentiometriä joka normaalisti kertoisi servon asennon ohjauselektroniikalle. Käännä potikkaa hitaasti jompaan kumpaan suuntaan kunnes servo lopettaa pyörimisen. Tässä on moottorin “nollakohta” ja nyt vain pulssinleveyttä kasvattamalla tai vähentämällä voit ohajata moottoria pyörimään eteen tai taakse halutulla nopeudella.
