Kirjoitan nopeaa ajatuksen virtaa joten pahoittelen sekavaa ja vaikealukuista tekstiä.
Aloitin tänään projektin jossa olisi tarkoitus muuttaa verkkokauppa.com ostettu 10euron radioohjattavaauto internetin yliohjattavaksi. Tämä projekti on harjoitteluprojekti, tulevaisuudessa tulevaa tekö-älyllä sekä internetin yli ohjattavaa tankkiprojektia varten. Eräänlainen mercury-ohjelmaa ennen Apollo-ohjelmaa.
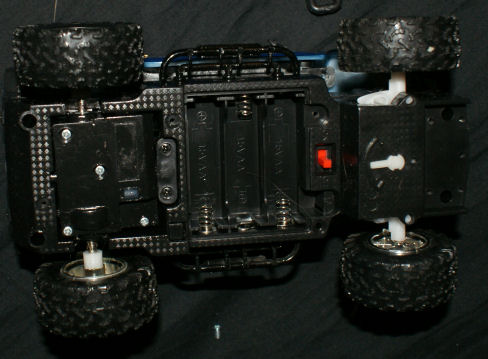
Eli ostin verkkokauppa.comista 10euron hummerin. Auto syö 3xAA paristoja ja ohjain 2xAA paristoja. Auto kulkee eteen, taakse, oikealle ja vasemmalle. Autossa on vain kolme nopeutta eteenpäin kovaa, pysähdyksissä ja taaksepäin kovaa. Ohjaus on samallainen; joko käännytään täysiä vasemmalle tai oikealle. Autoon syttyy ajovalot kun autolla ajaa eteenpäin ja peruustusvalot kun ajetaan taaksepäin. Autolla ei voi ylittää pienimpiäkään esteitä ajettaessa eteenpäin. Tämä siksi että auton massiivinen karjapuskuri ottaa pohjasta kiinni. Kuitenkin esteiden ylipääsee ongelmitta peruuttamalla.
Okei eli juuri sellainen radio-ohjattava kuin 10eurolla voisi olettaa. Autossa on hyvä alusta tämmöiselle projektille!
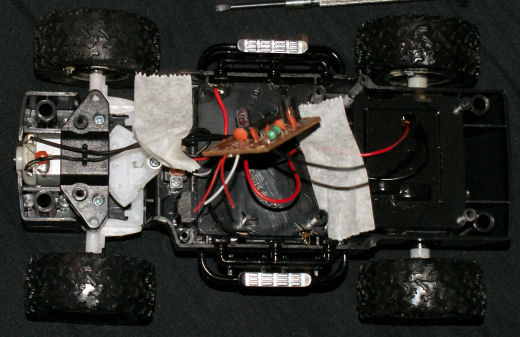
Seuraavaksi vuorossa on katsoa mitä muovien alta löytyy. Ohjaus on toteutettu etupyörissä moottorilla joka pyörii kunnes stoppari tulee vastaan tai joystikista päästetään irti. En halua purkaa koteloa jossa on autoa liikuttava moottori. Leikkasin rajusti vain ajovalot ja peruutusvalot poikki koska en näe niillä mitään käyttöä. Ainiin mainittakoon että maalarinteipit tosiaan pitävät johtoja autossa ihan tehdasvalmisteisesti paikoillaan eivätkä ne ole minun lisäämiäni.
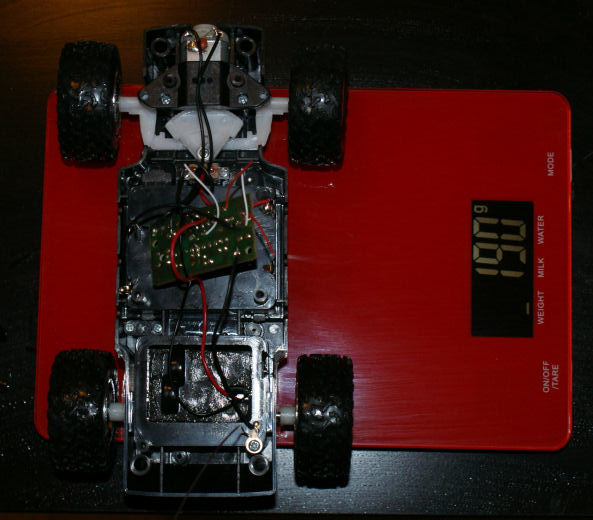
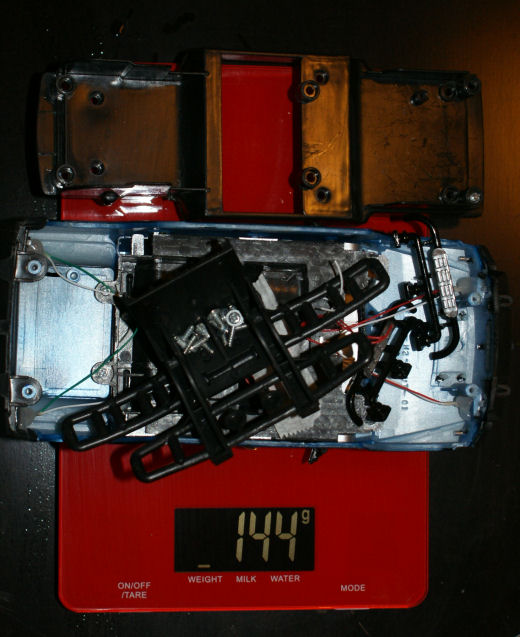
Punnitsin mitä autosta jäi jäljelle poistettuani siitä ylimääräiset osat joita en usko tarvitsevani. Punnitsin myös ne ylimääräiset osat jotta sain kuvaa paljon olin painossa säästänyt. Melkein 50%!
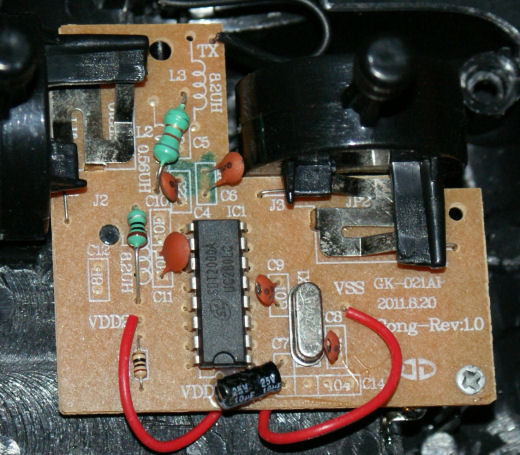
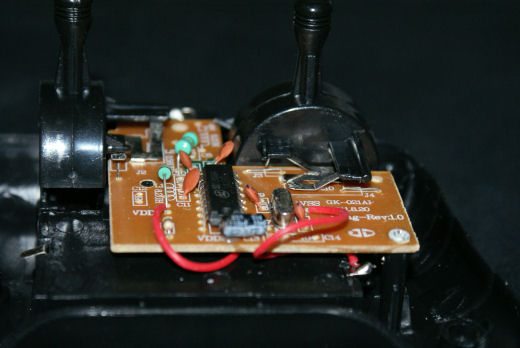
Auton ohjain oli toteutettu yhtä kylmänviileällä tekniikalla kuin itse auto.
Projekti jatkuu tästä rakennussuunitelman tekemisellä. Autoa on ehkä tarjoitus ohjata internetin yli arduino+raspberry pi kompolla jota jatketaan webbikameralla ja nettitikulla. GPS:kin olisi tarkoitus autoon liittää jos se ei liikaa painoa tuo. Virtaa voisi syöttää esim 3x16850 akuilla hakkuria käyttäen ja ohjauksen vaihtaa servomoottoriksi. En tiedä haluanko koskea itse ajomoottoriin. Olisi kiva saada autoon myös ultraäänisensori jotta saisin sen käyttämisestä kokemusta.
Olen tyytyväinen ostokseeni ja alusta vaikuttaa siltä että sen päälle saa helposti rakennettua lisää.
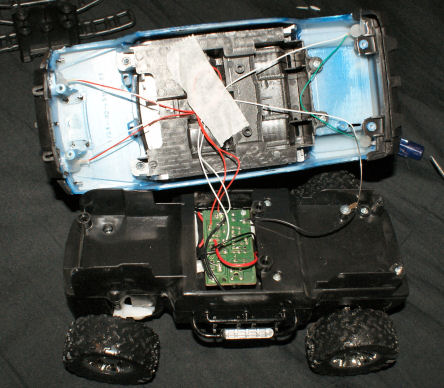
Mallailin robotin osian ihan ilman sen kummempaa logiikkaa runkoon. GPS:ssiä tulee ehkä kaksi tai kolme vierekkäin ja niissä onkin omat akut. Lisäksi tuosta uupuu vielä nettitikku ja virranhallintaan liittyviä palikoita. Tuon webbikameran voisi kanssa laitaa kääntymään servoilla.
Kuvia jaksan aina ottaa mutta kirjoittaminen jää välillä vähän puolitiehen.
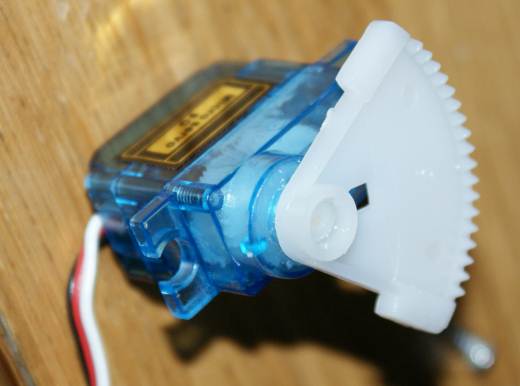
Eli tuota ohjausta tuli hoitamaan tuollainen halpisservo, joka sattui olemaan melkein oikean kokoinen tuohon kohtaan johon se liimattiin. Otin Dremlelillä vähän tappia autonrungosta pois ja super- ja 2-komponenttiliimalla tuo V:n muotoinen ratas servoon suoraan kiinni. Sitten kuumaliimalla servo koriin kiinni. Mietin jo että tekisin koriin ruuvinpaikat mutta epäilin että korin muovi vain lohkeaisi siitä.
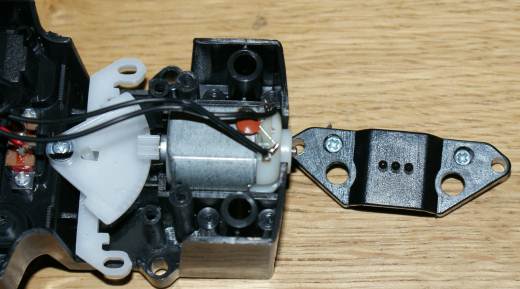
Katsoin myös vähän tuota moottoria ja moottoriboksi vaikuttaa siltä että se on täynnä jotain rasvaa joka estää veden pääsyä moottorilaatikkoon. Yksi syy lisää miksi en halua tuota avata. Toisaalta eteenpäin menovoimaa antaa samallainen moottori kuin hoiti ohjausta joten siinä mielessä tekisi mieli avata tuo loota.
Korissa on monta tappia ja koroketta jotka olen päättänyt leikata irti. Liikoja en halua leikkailla jotta korin jäykkyyys säilyyy. Kuumaliima vaikuttaa siltä että se sopii tähän projektiin kiinnikkeeksi enenmmän kuin hyvin. Monia aivan turhia reikiä pitää vielä tilkitä aivan lopuksi jotta lika pysyisi paremmin pois. Piirit ja akut olisi tarkoitus laittaa tupperware-laatikoihin jotta ne olivat hyvin suojassa vedeltä ja pölyltä.
Akkujen kanssa olen myös miettinyt 2s2p ratkaisua, en vain muista onko minulla missään 18650x2 pidikkeitä.
Seuraavaksi olisi tarkoitus katsoa ajomoottoria. Laitan sille menemään ~5volttia PWM:mmänä transistorilla ohjattuna. Sitten pitääkin ruveta miettimään autoon ultraäänisensoreita ja ajokameran servon mahdollisuutta.
Eli rakensin tänään sähkönsyötöt ja asensin h-sillan. Youtube videossa auto ajelee satunnaisesti eteen ja taakse. Välillä se jäi taaksepäin mentäessä tilaan jossa se ei suostunut liikkumaan.
Ohjausservolle, raspberylle, arduinolle ja sensoreille tulee omat virrat step down muuntimella ja sitten ajomoottorille on oma stepdown muunnin. Virtaa tuo 4x 18650 akut.
Paino nyt 491gr
Jostain syystä en saanut ohjausta toimimaan vaikka kyse on pelkästä servosta. Projekti rupeaa näyttämään hyvältä.
Epäilys siitä että robotin ohjaukseen käytettävä servo saattaisi olla rikki alkaa hiipimään mieleen. Voi olla että saisin vaihdettua pelkän servon ohjain piirin helpommin. Katsotaan mutta hyvältä ei näytä.
Vaihdoin ohjausseervon uuteen. Olen myös jotenkin onnistunut polttamaan pinnit 10 ja 11 arduino pro:stani
Huomasin seuraavat asiat:
-Lelun muovi muuttuu pehmeäksi ja muokattavaksi kun sitä puhaltaa 200C lämpöisellä ilmalla
-Kun leikkaa leluun servon paikkaa patterikotelon kohdalle, kannattaa varmistaa että paristot eivät ole enää kotelossa sisällä
Ohjaus ja ajomoottorit toimivat nyt arduinolla. Seuraavaksi siirryn arduinon liittämiseen raspberry pi:hin
Päätinkin ruveta rakentamaan etäisyys sensoreita robottiin koska robotilla on nyt niin helppo t¨äräyttää täysiä seinään että jonkin lainen seis kytkin robottiin tarvitaan.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}