
[b]Mistä on kyse?[/b]
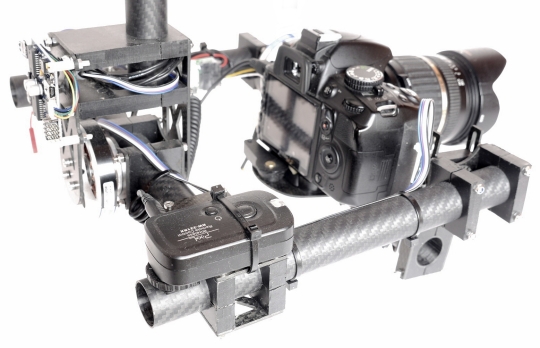
Tässä artikkelissa tutustutaan harjattomilla moottoreilla toimiviin kameranvakauttimiin, niiden elektroniikkaan (moottorit ja ohjaimet), mekaniikkaan ja käyttökohteisiin. Tämän artikkelin tarkoituksena on antaa joitain perustietoja kameranvakauttamista. Kameranvakauttimella nimensä mukaisesti vakautetaan kameraa. Vakauttimia käytetään erityisesti kauko-ohjattavissa ilmakuvaushelikoptereissa videokuvaukseen. Itse rakensin kameranvakauttimen, josta kuva yllä.
Alunperin vakauttimet kehitettiin nimenomaan ilmakuvaamistarkoituksiin, mutta viimeaikoina ne ovat levinneet myös maanpinnalta tapahtuvaan kuvaamiseen. Harjattomalla moottoreilla toteutetun vakauttimen suurin etu on, että se pystyy vakauttamaan kameran oikein säädettynä lähes täysin. Haitta puolia ovat kohtuullinen paino ja työläs säätö.

[b]Toiminta[/b]
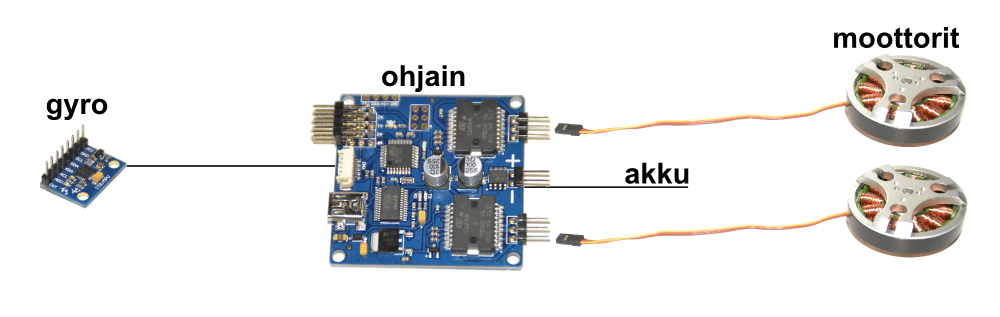
Harjattomilla moottoreilla varustettu vakautin toimii siten, että moottoreiden ohjausyksikön gyro (joka on kiinnitetty “kamerahyllylle”) tunnistaa kameran kulmavirheen ja tämän jälkeen ohjain ohjaa moottoreita siten, että kamera palautuu taas oikeaan asentoon. Kuten ensimmäisestä kuvasta huomaa moottorit on kytketty suoraan ilman välitystä liikutettavaan osaan, jolloin osaan kohdistuva vääntömomentti on hyvin pieni, jonka takia koko mekaniikan tulee olla erittäin tarkasti tasapainotettu (= kameran voi laittaa mihin tahansa asentoon siten, että se jää siihen eikä liiku, kun moottorin ovat pois päältä).
Jokaiselle liikkeelle on oma moottorinsa, joten tavallisessa vakauttimessa on 2-3 moottoria (pitch, roll, yaw). Pitch ja roll - akselit pitävät kameran vaakatasossa ja yaw-akseli pitää kameran suunnan. Kameran asentoa on mahdollista ohjata syöttämällä servo-signaalia ohjaimeen. (Servo tarkoittaa tässä yhteydessä kauko-ohjattaviin laitteisiin tarkoitettua servoa)
[b]Ohjaimet[/b]
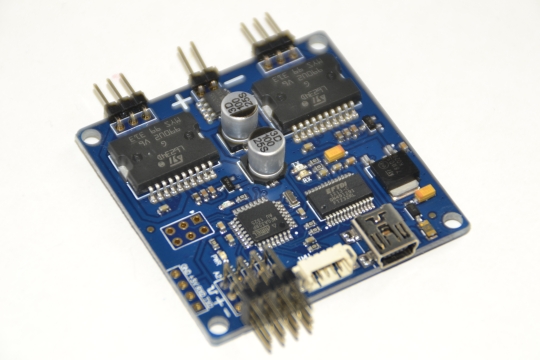
Kuten yllä mainittiin moottoreiden ohjaamiseen tarvitaan ohjain, joka ohjaa moottoreita. Ohjausyksikkö koostuu ohjaimesta ja gyrosta. Ohjain kuten yllä olevasta kuvasta näkyy muodostuu moottoriohjaimista 2-3 kpl (kuvassa 2kpl L6234D = kolmivaihemoottoriohjain), mikrokontrollerista (kuvassa Atmel ATmega 328p), usb <=> serialport -piiristä (kuvassa FTDI FT232RL) ja kasasta kondensaattoreita, vastuksia ja diodeja. Ohjain on siis melko yksinkertainen.
Ohjaimeen kiinnitetään kuvan osoittamalla tavalla moottorit, IMU(=gyro ja kiihtyvyys anturi), ja virtalähde joka on useimmissa tapauksissa 2-4 kennoinen lipo-akku (=7.4-14.4V). Ohjaimen PID-säädinten ja muiden parametrien säätäminen tapahtuu usb:n kautta.
Ohjaimia on nykyään monenlaisia ja niitä on saavavilla monilta eri valmistajilta. Alla on esitelty yleisimpiä ohjaimia:
[b]Brushless-gimbal-BruGi [/b]
Saksalaisen yhteisön kehittämä ohjain. Koko projekti on avointa lähdekoodia, joten halutessaan pääsee kaikkeen käsiksi. Ohjain on ohjelmoitu arduino-kehitysympäristöllä. Ohjain on vain kaksi akselinen, joten sillä saa vakautettua vain roll- ja pitch -akselit. Kolmannenkin akselin voi vakauttaa, mutta siihen tarvitsee kaksi ohjainta, joista toinen ohjaa yaw-akselia yksinään(tähän tarvitaan muokattu ohjelmisto, jollainen löytyy täältä: g2400w.web.fc2.com/hachikazuya.html Varoitus: nettisivut hyvin sekavat).
Projektin koodit, piirilevykuvat ja GUI löytyy osoitteesta:
sourceforge.net/projects/brushless-gimbal-brugi/
[b]EvvGC 3/2axis Brushless Gimbal Controller[/b]
EvvGC-ohjain on myöskin avointalähdekoodia. Ohjain käyttää STM32F103RC -mikroprosessoria ja sen koodit on kirjoitettu keil-kielellä. Kuten nimestäkin huomaa se pystyy vakauttamaan 3 akselia. Tällä hetkellä kyseinen ohjain vaatii vielä hieman kehitystyötä, sillä sen saattaminen toimintakuntoon vaatii vielä vähän kikkailua (esimerkiksi ohjain ylikuumenee helposti ja projektin virallinen koodin kehitys on pysähdyksissä).
Pojektin koodit, piirilevykuvat ja GUI löytyy osoitteesta:
rcgroups.com/forums/showthread.php?t=1872199
[b]BaseCam SimpleBGC controller (aikaisemmalta nimeltään AlexMos SimpleBGC)[/b]
SimpleBGC -ohjaimet ovat ehkä suosituimpia harrastelijoiden keskuudessa, niiden helppokäyttöisyyden ja toimivuuden ansiosta. SimpleBGC -ohjaimet eivät ole avointalähdekoodia. Ohjaimia on montaa erilaista mallia muun muassa kahdelle ja kolmelle akselille. Ohjainten ongelma on se, että niiden hinta on paljon suurempi kuin edellä mainittujen avoimenlähdekoodin ohjainten.
Nettisivut: basecamelectronics.com/
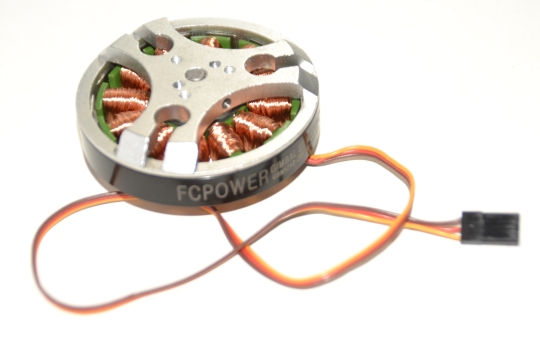
[b]Moottorit[/b]
Moottoreina käytetään harjattomia moottoreita. Vakautusta varten ei voi käyttää mitä tahansa moottoria suoraan. Nykyään on tarjolla laaja valikoima harjattomia moottoreita, jotka ovat tehty vakauttimia varten. Jos kuitenkin haluaa käyttää jotain ei alunperin vakautinta varten suunniteltua moottoria, täytyy se käämiä uudelleen. Moottori käämitään siten, että käämien resistanssi on riittävän suuri, koska moottori ohjaimet eivät kestä isoja virtoja (esim. L6234D kestää hetkellisesti vain 3A ). Uudelleen käämimättömät moottorit ja niille tarkoitetut nopeudensäätimet, riippuen moottorista ovat suunniteltu paljon suuremmille virroille.
[b]Mekaniikka[/b]
Kuvista näkee hyvin mekaniikan rakenteen, joten sitä ei käsitellä tässä kuin lyhyesti. Kuten lähes kaikissa asioissa keveys on usein tärkeässä roolissa, joten materiaaleina käytetään mahdollisimman kevyitä ja kestäviä materiaaleja, kuten hiilikuitua, alumiinia ja muovia. Ensimmäisessä kuvassa on minun suunnittelema vakautin, joka on tehty pääosin 25mm hiilikuituputkesta ja 2mm hiilikuitulevystä ja muovista. Suurin osa osista on tehty cnc-koneella.
Mekaniikkaa suunniteltaessa tulee ottaa huomioon tasapainotus - kameran paikka täytyy pystyä muuttamaan joka suuntaan, siten että kamera saadaan tasapainoon.
[b]Käyttö[/b]
Ennen kuin vakautinta voi käyttää täytyy sitä säätää. Ensiksi vakautin tasapainotetaan mekaanisesti siten, että kamera on täysin tasapainossa pitch, roll ja yaw akseleiden suhteen. Mikäli vakautin on tasapainotettu huonosti, se on lähes käyttökelvoton, koska silloin moottorien momentti ei riitä pitämään kameraa paikallaan.
Kun mekaaninen puoli on tasapainossa täytyy ohjain säätää. Ohjain liitetään usb:n avulla tietokoneeseen. Netistä löytyy kullekin ohjaimelle ohjelmisto, jonka avulla ohjaimen asetuksia voidaan muuttaa. Ohjaimet käyttävät kameran vakauttamiseen PID-säädintä, jonka arvot täytyy säätää kohdalleen, jotta kamera pysyy vakaana. Säätäminen onnistuu helpoiten kun säätää yhtä akselia kerrallaan, irrottamalla muut moottorit ohjaimesta. Säätäminen tapahtuu siten että I:n ja D:n arvot asetetaan pieniksi ja sitten säädetään P:n arvoa kunnes kamera on tärinän “kynnyksellä”, sen jälkeen säädetään I ja D siten loputkin tärinät häviävät. Netistä löytyy hyviä tutoriaaleja, mutta kokeilu periaatteella ja kärsivällisyydellä pääsee jo pitkälle.
[b]Mistä?[/b]
Nykyään on mahdollista ostaa varta vasten perinteiseen videokuvaukseen tehtyjä vakauttimia. Vakauttimia on olemassa monen kokoisille kameroille aina ammattilaisvideokameroista kevyihin kypärä kameroihin - siis hinta haarukka on alle sadoista tuhansiin euroihin.
Jos päättää tehdä itse vakautimen ei välttämättä säästä paljoa, sillä esimerkiksi Kiinasta on saatavilla vakautimia hyvinkin edullisesti. Toisaalta itse tehdystä saa tehtyä juuri sellaisen kuin haluaa ja myös rakentelu projektit ovat mitä parasta ajanvietettä, joten suosittelen harkitsemaan DIY-versiota, mikäli mahdollisuus siihen löytyy.
Jos jokin asia jäi epäselväksi, niin laittakaa viestiä, jotta voin selventää.
jlv
 Jossain vaiheessa pitää saada tuo 3-akselikin käyttöön.
Jossain vaiheessa pitää saada tuo 3-akselikin käyttöön.