I need to have the information of the the angle of inclination of the RuuviTag+ in degree (0-360).
In order to make that, I’m trying to use a past code made for ADXL335 accelerometer. It has coded to get the pitch by using Z and X values and some transformation based on Vreference and so on… I don’t have a clear idea on how it works. The code that I made until now is that:
The accelerationAngleFromX should correspond to your x_g_value, assuming that the RuuviTag is stationary and only acceleration is the gravity. You can then use var pitch = ( ( (Math.atan2(z_g_value,x_g_value) * 180) / 3.14 ) + 180 ); (or similar, I’ve not checked what the result would be).
The angle actually shown is a value between 0 and 360, but it is not the true value. It has a strange behavior.
Is that strange behaviour maybe due to an not full compatibility with Espruino on this specific case?
What means the value that we get from accValues? Like accValues.x?
For me it is really important to take the value of the angle instant by instant with a certain reliability, as it will be the basis of my project.
Thanks for help!
At this point I made my measurements and I got (angle in degree):
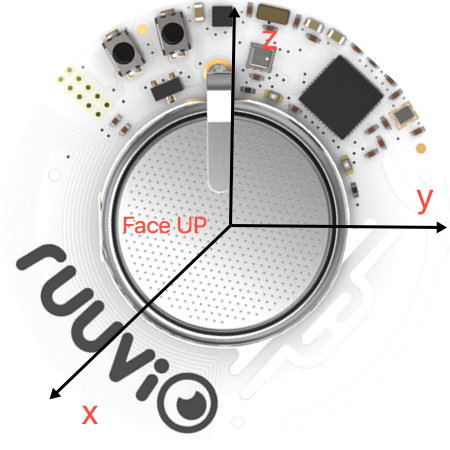
Standing on the table, FaceUp to the ceiling: 180 - 182 / 358-359
FaceUp to me: 92 - 93 / 263 - 264
FaceUp down: 2 - 5 / 173 -174
FaceUp outwards: 271 / 88
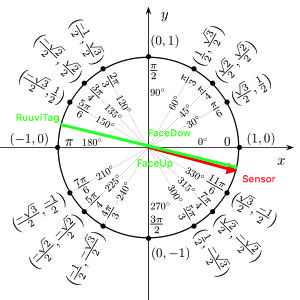
Moreover, having the FaceUp towards the ceiling and tilting it towards me, the angle should be 135° in reality the one measured is 225. In fact, the values that should be between 180 and 90 but those measured are 180 and 270.
This should be because of how the sensor feels the gravity. What I need is a unique angle value following the counterclockwise fencing (see this picture).
Maybe this STMicro article about 3-axis sensing, especially equations 6. and 7. would help?
Or maybe you could drop the angleBetweenVectorComponentAndAxis as it seems that the original code meant “Acceleration of axis x in g”, which is actually the same raw value which RuuviTag gives
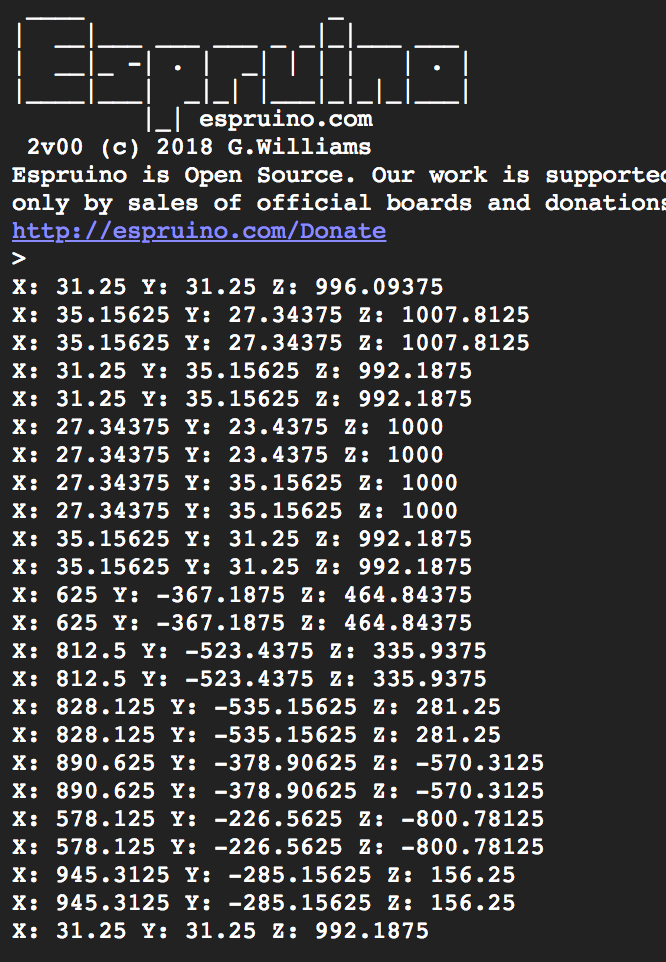
Let’s start again from the beginning: what do these data mean? What is the unit of measurement?
I don’t understand what these values are. Could you please explain?
My problem is to get, in some way, instant by instant the angle of inclination measured by the RuuviTag, measured in degrees between 0 and 360, so I can perform some operations such as counting the laps of the device.
Thanks for help.
The raw values are in milli-g, thousandths of a g.
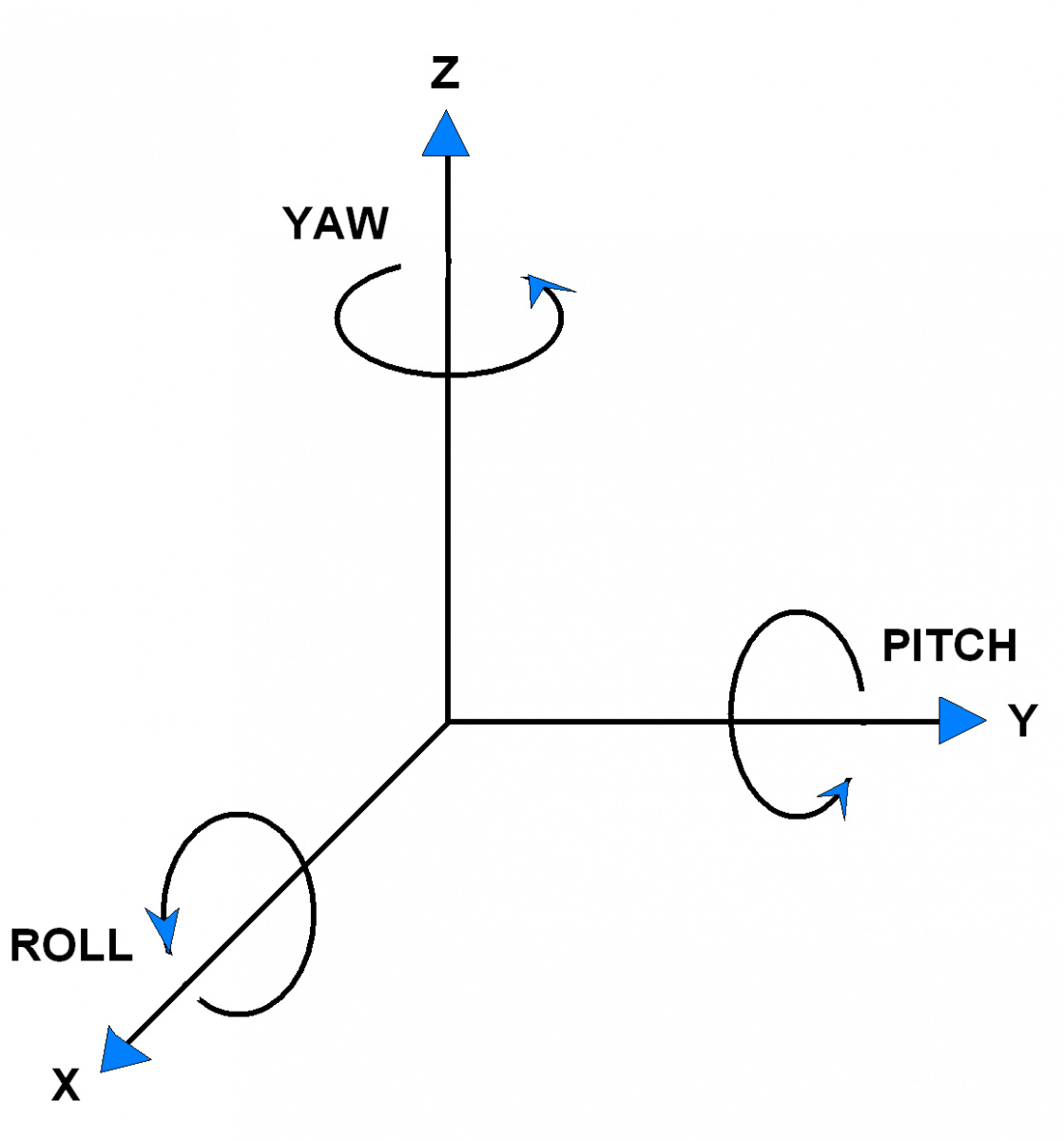
I’m not too familiar with the mathematics on how to convert the acceleration to roll and yaw, essentially all I can do there is to read through application notes and check if they have an algorithm that would work
I noticed that the RuuviTag takes values from the accelerometer every 900 - 950 ms. In fact, the value does not change within that interval of time. Why this limit? Is it possible to change it to increase the refresh rate through Espruino?
I hope at least it can be modified via firmware (I bought the devkit that has to arrive).
I’m not sure how Espruino configures the sample rate, but I’m sure it’s configurable as the Espruino sets it to 1 Hz. LIS2DH12 supports at least 1, 10, 25, 50, 100, 200 and 400 if I recall correctly.